por Luis A. del Molino EA3OG
Esta es la segunda parte de una serie de tres partes que pretemde la divulgación y dar la bienvenida a la nueva modalidad digital diseñada por José Alberto Nieto Ros EA5HVK y que muy rápidamente, por sus extraordinarias prestaciones, ha conseguido hacerse un hueco entre las numerosas modalidades digitales, convirtiéndose en la modalidad favorita de los aficionados a las comunicaciones digitales realizadas mediante un PC y de teclado a teclado.
A modo de resumen, recordemos todo lo explicado anteriormente:
Instalación del programa
En la primera parte de las tres sobre el Modo ROS, describimos en qué se basa su tecnología y los detalles que le proporcionan sus extraordinarias prestaciones, así como sus variantes y, sobre todo, que debe realizarse su descarga gratuita de la web:
.
También describimos allí el proceso de instalación que es bastante sencillo y puede resumirse en la ejecución de dos programas: después de descomprimirlo todo en una carpeta, antes de correr el programa ejecutable propiamente dicho (por ejemplo ROS v6.7.0.exe), debe ejecutarse previamente el de instalación (en este caso ROS Install v6.7.0.exe), que se ha de ejecutar antes del programa ROS ejecutable propiamente dicho. Luego, podremos crear un acceso directo al programa en el escritorio del PC, que es lo más cómodo, o donde queramos.
También describimos los parámetros iniciales que como mínimo debemos configurar, concretamente las macros de la configuración personal del operador y la del equipo, recomendando la conexión por CAT (control por ordenador) de la que disponen prácticamente la totalidad de equipos modernos.
Así que vamos a dar por supuesto que has arrancado el programa y ya has comprobado que le entra el audio y que éste tiene el nivel correcto, de forma que la aguja indicadora se mueva en el margen verde del indicador de volumen del ROS y que, al accionar el botón TEST, el equipo se pone en transmisión y entrega la potencia adecuada de salida con un tono fijo. Alto, no sigas probando, pues aún debemos escoger la banda (la frecuencia) y ajustar la potencia de salida.
Siguiente paso: Escoger frecuencia
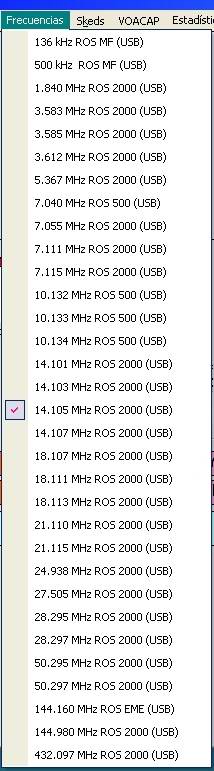
El siguiente paso es escoger una banda en la que tengamos antena y la frecuencia en que operaremos el ROS, obteniendo la lista del desplegable de frecuencias que se contempla en el cuadro adjunto. Si te funciona bien el control por CAT, el equipo se pondrá exactamente en la frecuencia que hayas escogido del cuadro desplegable de frecuencias del propio programa ROS y permanecerá atento a cualquier señal ROS decodificable que le entre, dentro del margen de captura +-250 o +-100 Hz, según lo que hayas seleccionado en la opción AFC de los mandos principales que se describen a continuación.
También puedes cambiar la frecuencia pulsando en los recuadros que se encuentran en el ángulo superior derecho de la pantalla del programa, junto al reloj que se muestra con horario GMT. Dispone también de unos botones muy cómodos para subir y bajar la frecuencia o podemos pinchar directamente los spots con mensajes que nos aparecen en la parte superior. No falta detalle para aumentar la comodidad del operador. ).
Ajuste de la potencia: TEST
Para ajustar la potencia de salida, en todos los equipos que permiten un control por CAT, en el ROS disponemos en el cuadro de mandos principal de un interruptor TEST que permite enviar un tono fijo de audio y ajustar el nivel de salida de nuestro transmisor. Si la emisora dispone de los comandos adecuados, también nos sirve para detectar que no se supere la ROE en un valor superior a 3:1. En este caso, también podemos activar en el menú Emisora la opción de que se desactive la transmisión. Lógicamente debemos ajustar de algún modo los volúmenes de la cadena de amplificadores que llevan el audio del ordenador al PC. En Windows, el volumen que controla la salida de audio es el de onda (wave). En el menú de la tarjeta de sonido disponemos de un atenuador adicional de 10 dB para reducir la salida en caso necesario.
También es muy posible que, dependiendo del equipo de que dispones, te aparezca un mando deslizante de potencia junto al botón TEST, que te permite ajustar un porcentaje de potencia de salida o la salida directamente en vatios, según la emisora.
En el ROS encontraremos un ingenioso sistema APC (Automatic Power Control) para reducir la potencia al mínimo necesario, y del que hablaremos más adelante, cuando empecemos con las prestaciones más originales que se le han ocurrido a José Alberto. Pero mucho antes de hablar del APC, antes tenemos que advertir a todos los operadores sobre la máxima potencia utilizable en un equipo de SSB y CW en modalidades digitales:
AVISO IMPORTANTE: Cuidado con la potencia de salida
En un modo digital, por prudencia no debemos sobrepasar nunca la potencia máxima recomendada en AM para nuestro transceptor. Lo normal es que esa potencia máxima en AM sea como mucho un cuarto de la máxima potencia de cresta de un transmisor de SSB. Así que si de nuestro transceptor nos dicen que tiene una potencia de cresta de 200 vatios, lo normal es que nosotros no debamos sobrepasar los 50 vatios en modo digital ni en AM y si es de 100 vatios de potencia de cresta, lo más sensato es que debamos limitarlo a 25 vatios en AM, una modalidad con portadora continua.
Insisto en que nosotros tenemos que guiarnos por la potencia máxima que recomiendan en AM para cualquier equipo y utilizar la misma en la operación digital. Normalmente las transmisiones digitales no son de tan larga duración como las de AM, en las que algunos se llegan a enrollar durante varios minutos. Esto último es más bien raro en una transmisión digital, pues nadie se dedica a enviar largas páginas de texto, especialmente si escribe con dos dedos y mirando el teclado. Lo normal es que utilice las macros pregrabadas.
Pero hemos de tener siempre en cuenta a nuestro enemigo Murphy; es decir, la posibilidad de que el equipo se nos quede activado inadvertidamente en TX en una modalidad digital y no nos demos cuenta. El amigo (yo prefiero llamarlo “enemigo”) Murphy tarde o temprano se hace presente y lo que puede salir mal, saldrá mal. Mejor prevenir que curar.
Si no disponemos de instrucciones para la potencia máxima en la modalidad AM, ajustemos la potencia para que como máximo alcance un cuarto de la máxima de cresta para SSB. También es bastante seguro ajustarla a un tercio de la potencia que marca el vatímetro de salida para la máxima potencia transmitida en CW.Así si nuestro equipo entrega 100 vatios de vatímetro en CW, no pasemos nunca de 30-35 vatios en cualquier modo digital.
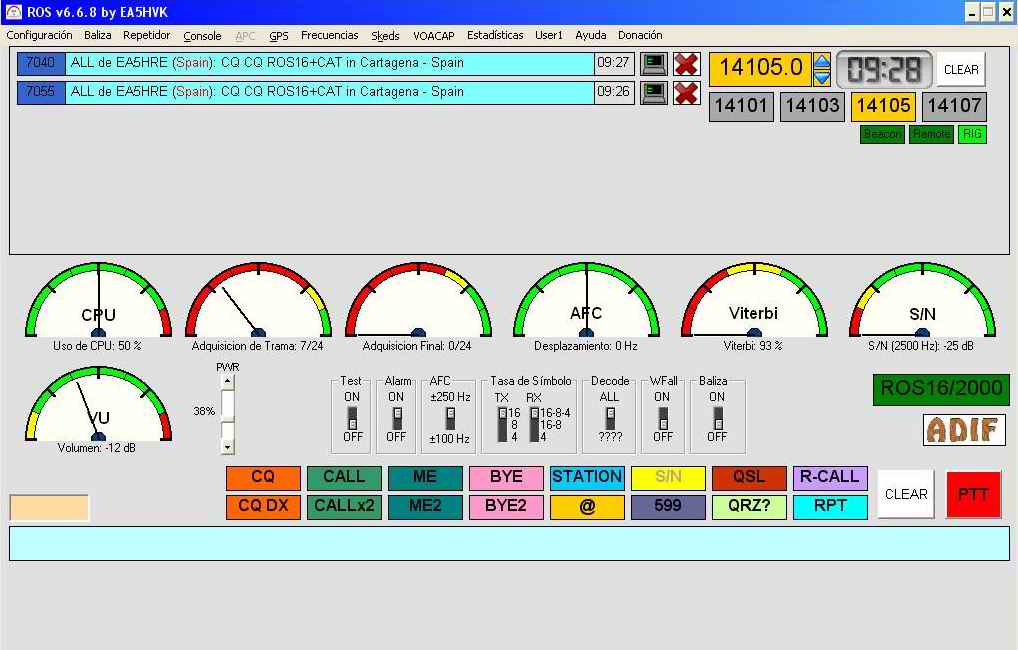
Descripción de los mandos centrales
Alarma: Nos permite activar un aviso sonoro que suena en cuanto se sincroniza una señal ROS que va a ser decodificada a continuación, y podemos configurar la alarma a voluntad mediante otro recuadro. A mí no me gustaba nada el sonido del altavoz interno del PC de sobremesa (los portátiles no lo llevan) que se activa en el Windows XP y le he configurado un sonido de campanillas mucho más bonito que he encontrado en las opciones de sonidos del Windows. En Windows 7 tendremos que configurar necesariamente un sonido mp3 o wav.
AFC (Automatic Frequency Control): Margen de captura en que puede sintonizar y sincronizarse una señal de ROS. Se recomienda estrechar ese margen a solamente 100 Hz para disminuir la carga de trabajo de la CPU, pues los equipos modernos con sintetizador casi todos tienen un error de frecuencia inferior, pero los analógicos más antiguos con VFO y contador digital puede que necesiten más margen de captura, pues su error en la frecuencia suele ser superior. En 10metros o en bandas de frecuencias superiores, en el que el error de la frecuencia puede ser más importante, sí que es útil ponerlo a 250.
Tasa de símbolo: Ya se han descrito en la primera parte todas las variantes que proporciona el ROS, pero aquí nos permite disminuir esa tasa a voluntad, cuando queremos aumentar las prestaciones del ROS en transmisión para hacernos con un DX difícil. Normalmente el corresponsal mantendrá activada la opción RX: 16-8-4 y nos decodificará perfectamente, sea cual sea la tasa de símbolo que hayamos escogido. En ordenadores lentos se recomienda tenerla a 16-8 para bajar la carga de la CPU. De todas formas, cuando la CPU se dispara a valores elevados, el programa automáticamente pasa a modo 16-8 y AFC a 100Hz para facilitar el sincronismo. También se desconecta la cascada (waterfall) cuando la CPU alcanza el 100%.
Decode: ALL /??? Si introducimos un indicativo concreto en la casilla a la izquierda de las macros para llamarlo mediante una macro, se activará automáticamente la decodificación para este indicativo únicamente, de forma que, al terminar el QSO, debemos utilizar este conmutador deslizante para activar la opción ??? y volver a Decodificar ALL (TODOS). De todos modos, cuando hacemos una llamada de CQ, automáticamente se pone en ALL.
WFALL: Activa el visor de la cascada que nos permite detectar las señales débiles mediante la vista, un sistema algo más sensible que el oído para detectar señales inaudibles. En el menú desplegable de Configuración -> Preferencias -> Waterfall podemos escoger entre “Escala de grises” y “Fósforo verde”.
Baliza: Nos permite activar una baliza que se transmite automáticamente a intervalos para que el ROS informe automáticamente de nuestra presencia con una transmisión temporizada por radio y, en el desplegable “baliza”, podemos determinar el tiempo de intervalo entre transmisiones y la información que se envía en cada una. Lo normal es tenerla desactivada. Tenemos que tener en cuenta que, si hay actividad ROS en el canal, la baliza se inhibe automáticamente y no se pone en transmisión mientras se mantenga otra señal ROS presente. También se inhibe el temporizador de la baliza cuando el sistema detecta que no hay audio suficiente de entrada, o el porcentaje de utilización de la CPU es demasiado elevado para decodificar, evitando balizas “sordas” que no son capaces de aportarnos ninguna información de retorno ( feedback).
Operación básica: RECEPCIÓN
Probablemente deberíamos haber visto ya en nuestra pantalla el CQ de alguna estación o algún otro mensaje ROS. En nuestra pantalla debería haber aparecido una línea como la siguiente y analicemos su significado:
RX16: 15:04 @ -39,1 Hz: CQ CQ de UR3EZ/A de UR3EZ/A in KN64so -15 dB 2562 km @ 071 14.103 Mhz
RX16: Modalidad de ROS utilizada para transmisión con 16 baudios en este caso.
15.04: Hora GMT en que se ha producido la sincronización
-39,1 Hz: Desviación entre la frecuencia de la estación que llama y la nuestra.
CQ CQ de UR3EZ/A: Texto de la llamada general o del mensaje si no es un CQ
In KN64so: QTH Locator de la estación
: Confirma que el texto recibido ha sido decodificado al 100%
-15 dB: Diferencia entre el nivel integrado de la señal recibida durante toda la transmisión y el ruido integrado a lo largo de la misma. Aquí nos indica que el nivel integrado de la señal está 15 dB por debajo del nivel integrado del ruido.
2562 km: Distancia calculada entre su QTH locator y el nuestro.
@ 071: Rumbo en el que se encuentra la estación (Por el camino corto)
14.103 MHz: Frecuencia en la que estábamos escuchando.
Con el cursor encima del indicativo de la estación que llama CQ, podemos copiar su indicativo para grabarlo en la casilla vacía de la izquierda. El programa detecta automáticamente el prefijo del país y nos coloca la información y el icono de su bandera al lado. ¡Chapeau, José Alberto!
Cuando no disponemos de control del equipo por CAT, para evitar enviar reportes con una frecuencia incorrecta, el programa ROS utiliza la información contenida en las señales recibidas para detectar si su frecuencia se corresponde con la que hemos marcado como de transmisión. En caso de que no coincidan, el programa cambiará automáticamente la frecuencia de transmisión marcada en el ROS.
Operación básica: TRANSMISIÓN
Normalmente deberíamos pulsar sobre la macro CALL (llamada) para que en el espacio reservado para el texto a enviar aparezca ya el intercambio de indicativos al iniciar la transmisión de cualquier mensaje.
Posteriormente añadiremos o no algún texto con el teclado y pulsaremos PTT dos veces. Al pulsar la primera vez, el texto PTT cambia a STOP y parpadea en espera de que demos por terminado el texto cuando lo volvamos a pulsar por segunda vez. Si ya pulsamos dos veces de entrada, en cuanto termine de enviar el texto escrito o la macro, pasará automáticamente a recepción sin más. Como el doble clic es una operación muy normal en Windows, no tendremos problema en realizarlo y así ahorraremos el tiempo que se pierde hasta que se nos ocurra detener una transmisión digital vacía con solamente sincronismos.
Si en lugar de usar puramente macros, lo que queremos es usar el ROS para charlar por medio del teclado y además somos lentos escribiendo, es importante pulsar PTT con un solo clic. De esta forma tendremos todo el tiempo del mundo para escribir nuestro mensaje, al tiempo que nuestro corresponsal nos estará leyendo. Cuando acabemos de escribir, le damos otro clic al STOP y listo.
Que no nos contesta, pues Insistamos con el ROS de otro modo. Si no conseguimos que una estación nos decodifique cuando contestamos un CQ, en lugar de conectar un amplificador lineal, podemos disminuir inmediatamente la tasa de símbolo de TX de 16 a 8 y volver a probar. De esta forma, estamos mejorando nuestras prestaciones, a cambio de enlentecer la transmisión. Que no nos oye y vuelve a llamar CQ, todavía nos queda la opción de volver a probar con una tasa de símbolo inferior: 4 símbolos por segundo.
Recordemos que el control automático de la potencia APC, del que hablaremos más adelante en este mismo texto, está previsto para disminuir la potencia excesiva y no para aumentarla. Ya hemos hablado extensamente de las precauciones que se deben tomar con la potencia máxima transmitidacuando operamos en un modo digital cuya transmisión es continua.
Conexión y decodificación selectiva:
Vale la pena comentar aquí que el ROS en su versión actual permite la decodificación selectiva, de forma que puede haber más QSOs en la misma frecuencia y realizarse la decodificación separada sin problemas de la estación con la que hemos iniciado el contacto.
Eso permite que coexistan varios QSOs entre estaciones que se encuentran en Skip (que no se escuchan mutuamente) en la misma frecuencia, con corresponsales que si oyen a las dos estaciones en skip, es decir, que puede haber uno o varios terceros que oigan y decodifiquen a varias estaciones, sin que eso se afecte la calidad de la decodificación de una sola de ellas. Para ello se utiliza el conmutador DECODE del que hemos hablado anteriormente.
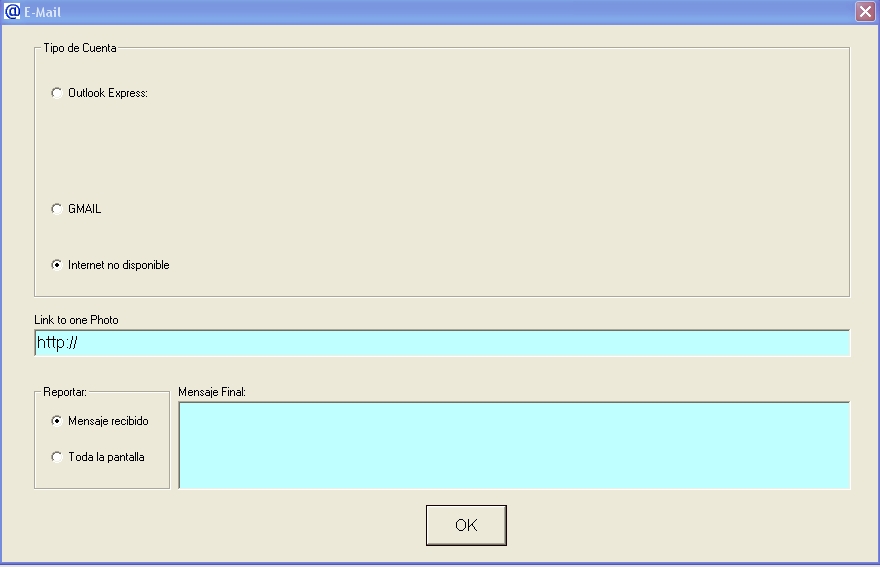
Otras configuraciones: la dirección de E-mail
Durante el QSO, si hemos configurado correctamente nuestra dirección de e-mai, en cuanto aparezca en la pantalla de recepción una dirección de e-mail, nuestro equipo enviará por Internet (si disponemos de Internet) un mensaje de correo electrónico informativo completo de acuse de recibo, con información completa como la que sigue:
EA3OG has received your Radio Message sent at: 11:59 UTCReceived Message: ‘Beacon de EA5HVK in IM97lq nietoros@hotmail.com ’
Operator Info:
Callsign: EA3OG
DXCC: Spain (EU)
Name: Luis
E-mail: ea3og@ure.es
QTH: Barcelona
Locator: JN11em
Station: Yaesu FT-817D, antena dipolos 80-40. Yagi TH-7 20-15-10
ROS Version: ROS v6.7.0
Signal Info:
Frequency: 14,103 Mhz
Mode: ROS16/2000
Symbol Rate: 16 Bauds
BW: 2000Hz
Frame Acquisition: 23/24
Frequency Shift: 17,7 Hz
Viberti: 2%
S/N (2500 H<): -10 dB; Fade Merge +10 dB
Distance: 460 km, Bearing 220º
Beacon: Off
Remote Control: Off
Vumeter Level: -10 dB
CPU Usage: Not Available
A la recíproca: Si nosotros enviamos un mensaje que contenga nuestro e-mail, porque hemos presionado la macro correspondiente (@), automáticamente nuestro corresponsal en ROS, si tiene configurado correctamente el suyo, nos enviará un mensaje con toda esta información anterior, en la que nos informa de cómo nos estaba recibiendo en ese momento.
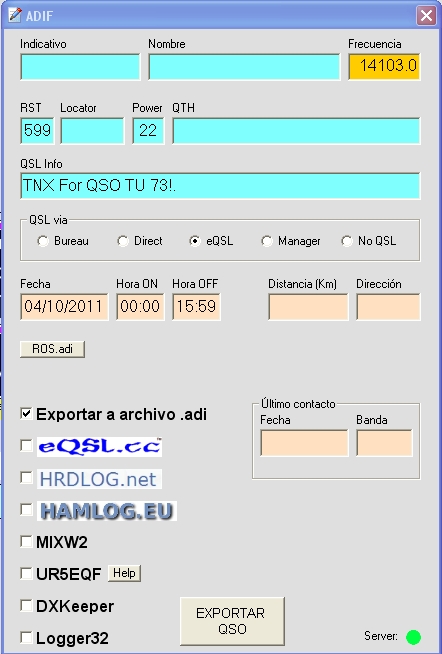
ADIF
Cuando completas un QSO, puedes clicar al terminar sobre el botón ADIF y completar los campos que te interesen que queden grabados en tu ordenador. Luego podrás presionar sobre el botón EXPORTAR QSO y así quedará grabado no solo en tu libro de registro, sino también en el log del programa que hayas escogido o en otros muchos como comentaremos a continuación.
En el menú que se abre al pulsar el botón ADIF, tienes que haber entrado previamente el nombre y el path completo del archivo <.adi> donde se grabarán tus QSO’s y que podrás cargar posteriormente en cualquier Libro de Guardia electrónico. Eso por una parte, pero aún hay más.
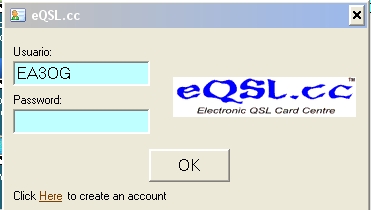
QSL electrónica
Si además quieres que se envíe tu confirmación automáticamente al servicio de intercambio de QSLs electrónicas eQSL.cc, marca la casilla de eQSL.cc y se enviará no solamente a eQSL.cc, sino a todas los demás sistemas de confirmación que hayamos especificado, siempre que nos hubiéramos dado de alta en otras webs de intercambio de QSL electrónica. Para darse de alta en las eQSL, debemos previamente haber configurado nuestro nombre de usuario y clave de paso en la configuración inicial del ROS.
Aquí podéis ver las pantallas correspondientes de los diferentes sistemas de QSLs electrónicas que han sido previstas por José Alberto para confirmarse automáticamente: e-QSL – HRDLog – HAMLOG-EU.
Por tanto, podemos confirmar nuestros contactos desde el mismo programa ROS, además de llevar el libro de registro (log) de los contactos realizados en nuestro ordenador con el mismo ROS o en cualquier otro programa diferente.
Es decir, también podemos exportarlo a otros programas de libro de registro instalados en el ordenador que en aquel momento estén funcionando, entre los cuales tiene previsto el envío automático a los siguientes programas: MixW2 – UR5EQF – DXKeeper – Logger32, como se ve en las pantallas respectivas.
En el caso de MixW2, el contacto se guarda directamente en la base de datos de MIxW, por lo que no es necesario mantenerlo en ejecución. En cambio en los programas UR5EQF, el DXKeeper y Logger32, éstos deben estar funcionando con la CAT desactivada en ellos.
Además, también tenemos la posibilidad de enviar el comentario al Cluster marcando la opciónCluster. No obstante, para subir un spot al clúster podemos realizarlo directamente mediante el menú Skeds que examinaremos más adelante en la tercera parte.
Propagación VOACAP
Una de las cosas que más me han fascinado del programa de José Alberto ROS es que me haya aficionado al mundo de las previsiones de propagación. He de confesar que nunca me había atraído especialmente este tema, porque siempre había considerado que parte de mi afición a la radio estriba en descubrir en cada momento qué me depara la suerte o sea la propagación. Por tanto, las previsiones no tenían ningún especial interés para mí.
Hay que tener en cuenta que las previsiones de propagación son mucho más interesantes para todos aquellos que planifican su operación previamente, porque van a participar en un concurso o están interesados en el DX de una forma especial, para lo cual necesitan investigar cuándo estará abierta la propagación para aquellas zonas en las que necesitan más contactos o un determinado país o expedición que les falta para la colección.
Sin embargo, la idea de José Alberto de ponérmelas tan al alcance de mi mano, con un acceso inmediato a un solo clic de distancia de la previsiones del programa VOACAP, sin que ni siquiera tenga yo que pensar previamente que voy a tener que navegar por Internet para buscarlas, ni que tengo que buscar el marcador correspondiente y que cuando se abra la página luego tengo que escoger una frecuencia, entrar una potencia etcétera… me ha fascinado y convertido en un adicto al VOACAP. Tal vez os suceda lo mismo si probáis el ROS.
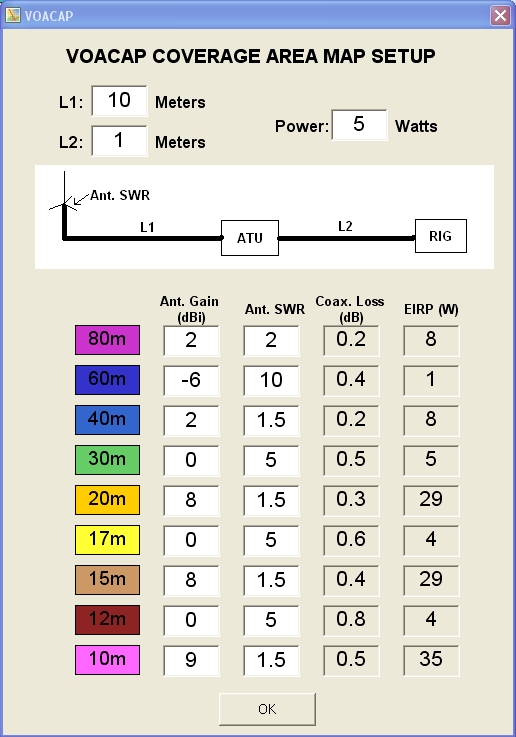
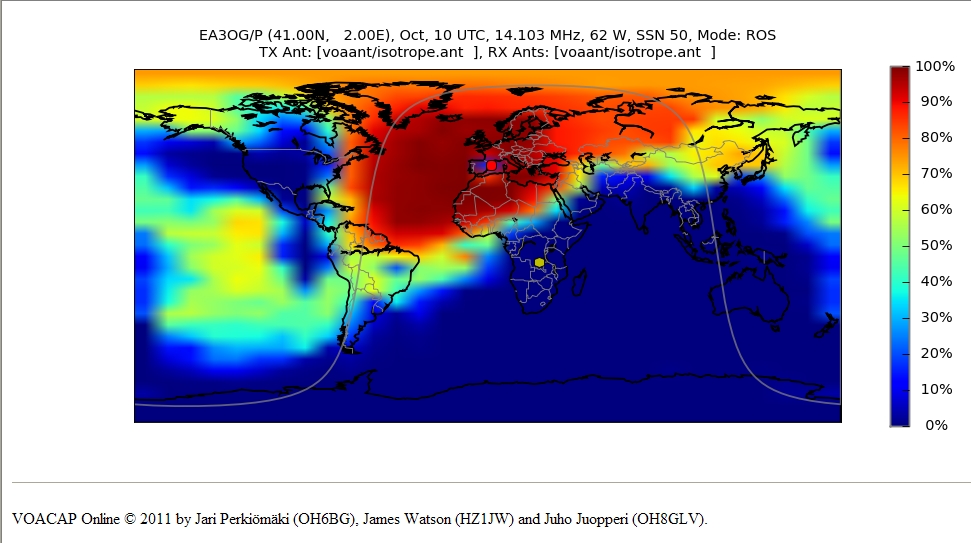
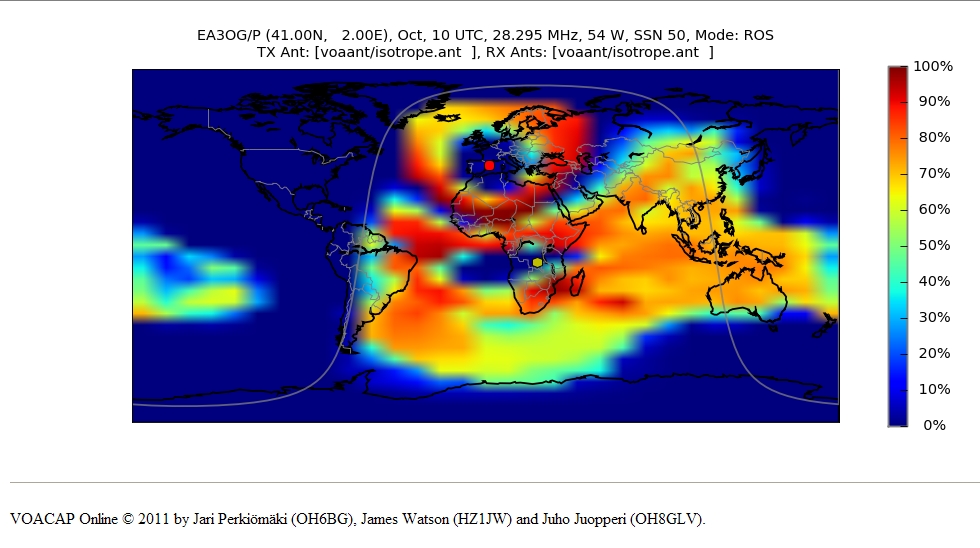
En el ROS disponemos de una configuración avanzada de la estación en la que podemos entrar los parámetros de nuestra estación, potencia, longitud y tipo de la línea de transmisión y ROE a la salida del acoplador (no en la entrada) para calcular la Potencia Isotrópica Radiada Equivalente (PIRE) y obtener una predicción adaptada a la potencia radiada por nuestra estación para ese momento en particular, tanto por el camino corto (habitual) como por el camino largo (excepcional). De ese modo podemos estimar los países y distancias que podemos conseguir en aquella frecuencia concreta, calculada expresamente para las prestaciones del sistema ROS. Si pasáramos a fonía o a otros modos digitales menos robustos, esa predicción no sería adecuada, salvo que echáramos mano a la ayuda de un amplificador lineal de kilovatio.
Os ponemos unos cuantos ejemplos de la propagación en 28 MHz y 14 MHz para que vayáis haciendo boca. A ver si tenemos suerte y se distinguen bien en color. De esta forma veríais que las zonas rojas son las alcanzables teóricamente según las previsiones de propagación con una probabilidad del 100%, mientras que las azules son las que son imposibles de comunicar, puesto que la probabilidad es casi nula o cercana al 0%.
CHAT ENTRE ESTACIONES ROS
A José Alberto, EA5HVK, se le ha ocurrido que, puesto que normalmente todas las estaciones que utilizan modalidades digitales están conectadas habitualmente a Internet, se podría montar un sistema de comunicación en paralelo al de radio. Un chat que permita el intercambio de comentarios, la búsqueda de frecuencias en que sea posible el enlace y otras muchas posibilidades.
De esta forma, se consiguen múltiples objetivos simultáneamente: Pongamos unos cuantos ejemplos, por lo menos los que yo he vivido y comprobado su funcionamiento, lo cual no quiere decir que no hayan otros muchos más.
1.- Cuando una estación envía una llamada general CQ, automáticamente envía una especie de Spot -ROS a todas las estaciones que tienen activo el programa ROS, diciendo estoy llamando CQ en tal y tal frecuencia. Buscadme.
2. Cuando una estación recibe en su pantalla correctamente decodificada una llamada general CQ, automáticamente envía un Spot-ROS a la estación que ha escuchado para que sepa hasta dónde llega.
3. Si al contestar un CQ no se consigue realizar el enlace, una de las estaciones, por medio del CHAT, puede sugerir a la otra cambiar de banda para volver a intentarlo.
4. También se puede contemplar en el mapa del PSK Reporter Propagation Map que se despliega desde el menú SKEDS todas las estaciones activas en ROS y en la banda en que se encuentran operativas y enviarles un mensaje para que cambien de banda e intentar el QSO. Esto lo veremos con más profundidad más adelante en la tercera parte.
5. Se puede conocer por medio de Internet cómo te ha recibido una estación y reducir la potencia al mínimo necesario como veremos a continuación en el apartado APC. Un gran objetivo para disminuir la polución y gasto de energía en las bandas.
APC (Automatic Power Control o Control automático de potencia)
Una de las prestaciones más originales que se le han ocurrido a José Alberto consiste en que, puesto que podemos saber por medio de Internet cómo nos recibe el corresponsal, podemos ajustar la potencia a la mínima necesaria para obtener una calidad suficiente para el enlace. Y no sólo se puede conseguir por Internet.
Concretemos: Si disponemos de un margen muy superior al umbral de la relación señal/ruido en el que empiezan los problemas de decodificación (normalmente un margen de 10 dB), ¿por qué no reducimos la potencia de nuestro TX para ajustarnos al nivel de potencia mínimo necesario?
Cierto que esto no puede realizarse en todos los equipos, pues esta posibilidad se basa en que el equipo transceptor disponga de comandos CAT que puedan aumentar o disminuir la potencia del transceptor. Si nuestro modelo en concreto no los lleva, José Alberto ya ha previsto que no se active la opción APC.
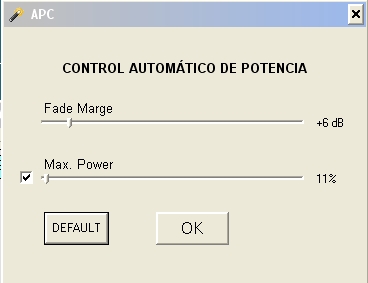
En el cuadro de configuración APC del APC, se observa claramente cómo se debe configurar. Nosotros debemos marcar de alguna forma la potencia máxima con la que deseamos que transmita nuestro equipo. Concretamente veréis que mi configuración marca el 11% de salida, pues en ese nivel he visto que con la presente configuración de audio, el modo ROS transmite alrededor de 20-30 W con mi equipo SDR-1000.
En algunos equipos la potencia se expresa directamente en vatios, en otros en porcentaje. El programa ya tiene el equipo en cuenta y la potencia viene expresada en los mismos términos que la emisora, tanto para el APC como para el deslizante de potencia junto al botón TEST.
Si se tratara por ejemplo de un Flex-1500, que sólo puede dar 5 W sin problemas en cualquier modalidad sin calentarse (máximo 10 W de cresta en SSB), pues lo configuraría con el 100% de límite máximo, teniendo en cuenta de que se trata de un equipo QRP que no va sobrado. Será difícil que sea necesario reducir la potencia, pero puede ser muy bien que con el ROS se necesite solamente 0.5 vatios.
De ese modo, si alguna estación dice que me recibe con un margen superior a los 6 dB, pues el ROS disminuirá la potencia de mi equipo y esperará a ver qué pasa a continuación y se irá autoregulando para mantener este margen que yo le he solicitado. Ingenioso, ¿no os parece? Además, cuando hacemos CQ para empezar otro nuevo QSO, la potencia se coloca automáticamente en el último valor que ajustamos manualmente.
Ah, y no es absolutamente imprescindible que el corresponsal disponga de Internet, puesto que puede enviarnos un control S/N (que ya está previsto en una macro) y, si no lo hace, basta que se lo pidamos nosotros por radio. Si no se dispone de Internet, el ROS utilizará los valores obtenidos de este paquete S/N.
Si lo que queremos es hacer contactos al límite, sólo tenemos que marcar en el Menú del APC, +5 o +6 dB de Margen, y llegaremos siempre superjustos. De forma análoga, podemos seleccionar +15 dB de margen y llegaremos siempre sobrados. El valor recomendado de Margen de Desvanecimiento es de 10 dB, un valor demasiado bajo cuando se trata de comunicaciones HF, pero que ha sido posible gracias a las características del modo ROS.
Otra vez ¡Chapeau!, Jose Alberto.
Conclusión
No hay conclusión. Como tengo que terminar ya este texto y se me está haciendo demasiado largo, no tengo más remedio que escribir una tercera parte sobre el ROS en la que os contaré otras muchas cosas interesantes, como el acceso al mapa de estaciones ROS activas, los Clusters, la utilización como consola remota, el uso como repetidor y otros detalles que seguro que ni siquiera me he enterado todavía, pues cada día descubro algo nuevo que se le ha ocurrido colocar a José Alberto en su programa.
Ah, ¿pero todavía no habéis probado el ROS? Os estáis perdiendo muchas emociones.